Camras Pointing metingen
Het pointing model:
Δaz = a0 + c1 / cos(el) - c2 * tan(el) - za * sin(az - aa) * tan(el)
Δel = e0 + b * cos(el) - r / sin(el) - za * cos(az - aa)
az, el: azimut, elevatie
a0: noord offset
c1: horizontale scheefstand beam
c2: hoogteverschil elevatie lagers
e0: elevatie offset
b: doorbuiging
r: refractie
za: scheefstand rail
aa: kompasrichting scheefstand
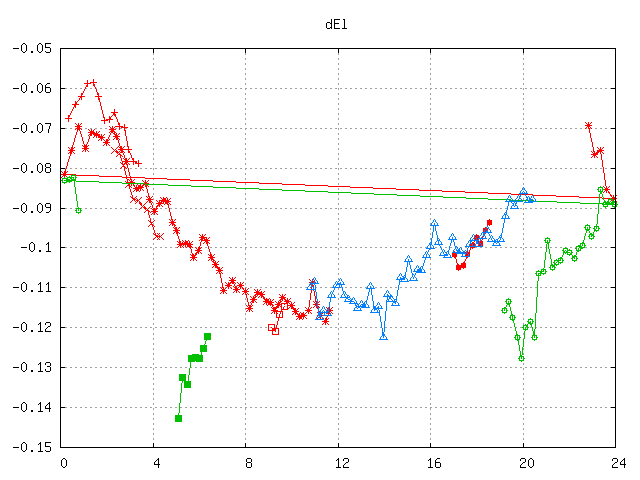
Meetresultaten van de eerste cross-scans:
Rood: CasA metingen in Mei
Groen: TauA metingen ni Mei
Blauw: CasA metingen in Augustus
De horizontale as de uurhoek in uren.
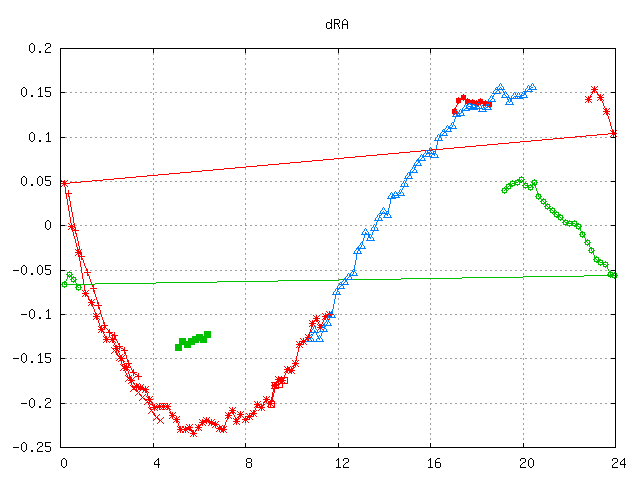
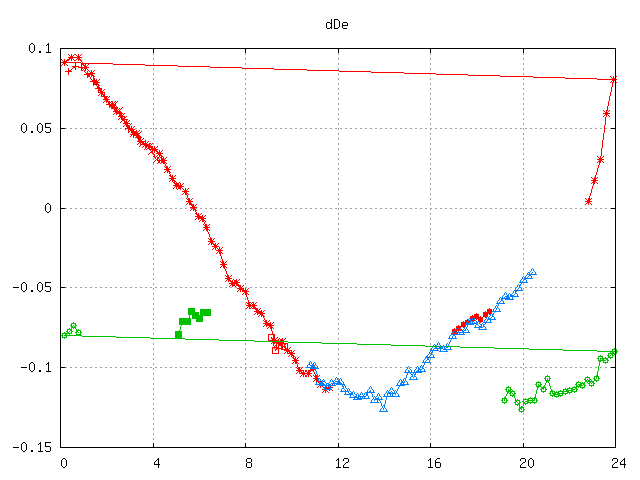
Offsets geconverteerd van RA/Dec naar Az/El

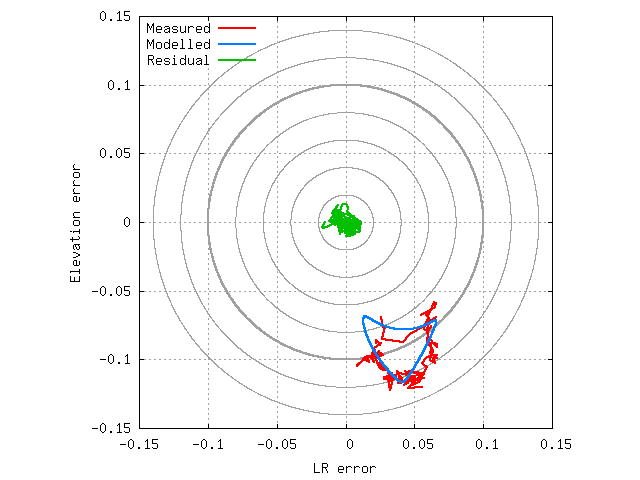
Het pointing-model toegepast op de CasA metingen:
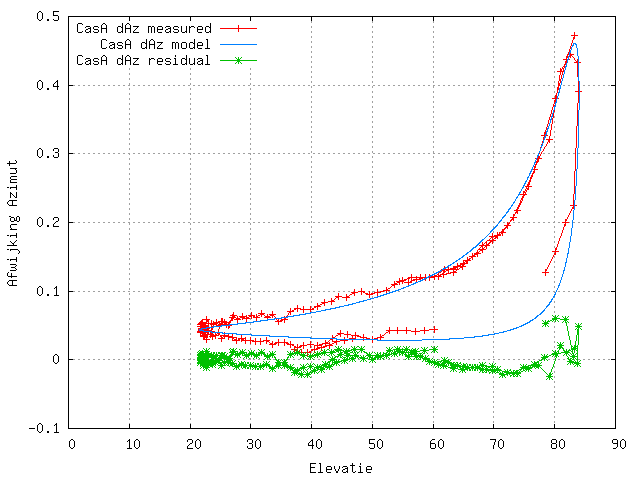
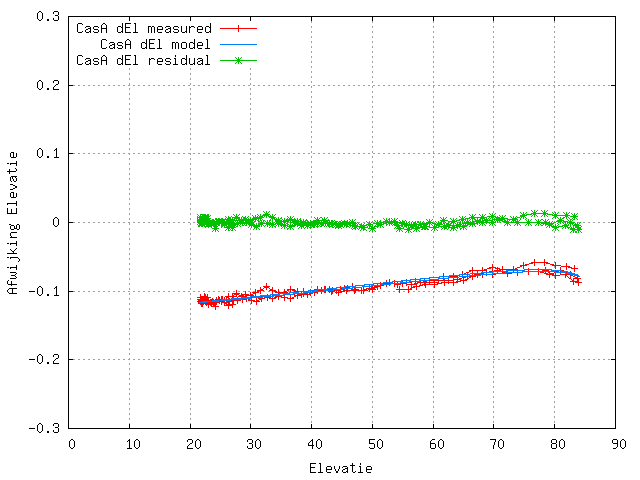

Gevonden parameters (in graden):
| a0: | -0.012 | +/- 0.012
|
| c1: | 0.058 | +/- 0.017
|
| c2: | 0.015 | +/- 0.014
|
| e0: | -0.041 | +/- 0.003
|
| b: | -0.046 | +/- 0.004
|
| za: | -0.008 | +/- 0.010
|
| aa: | -2.9 | +/- 3.6
|
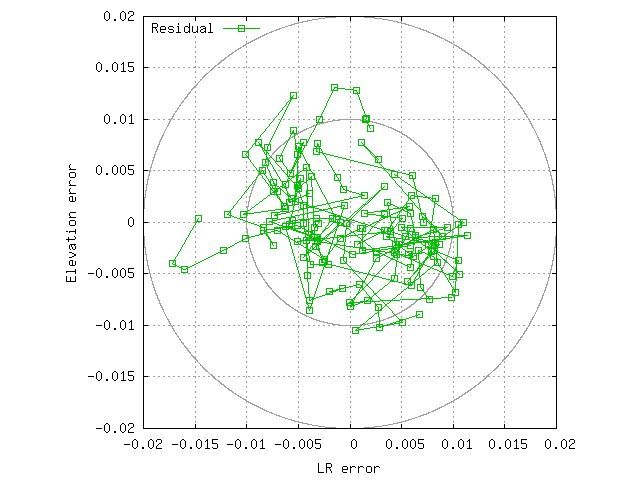
De gemiddelde pointing-error was 0.11 graden, en wordt hiermee teruggebracht naar 0.007 graden.